Winning Entries of Demo Program Contest 2008
1st Place: Move to the Clapping Sound

This is a demonstration of a robot replying with a “wan” and moves towards a person who claps his hands. Four microphones are installed to calculate the difference in time-of-arrival, from which the sound source can be detected. It is possible to calculate the sound source location, but due to the low sound reception accuracy, only the direction of the sound is utilized in this demonstration.
2nd Place: The Lost Frog

Path planning and obstacle avoidance are achieved using a vector method similar to Potential Field method, where the attractive force of goal and repulsive force of obstacles are calculated and the resultant force determines the subsequent robot direction. When the robot is trapped in a local minima, a virtual obstacle is inserted on the trapped location to let the robot escape and once again move towards the goal. The title of this demonstration does not particularly mean anything though.
3rd Place: Reaching Building 3D!

In order to make the robot travel from room 3L302 to 3D307, the easiest way to achieve this is by following the left wall throughout the route. Thus a wall following program is created, with URG as the only external sensor. The robot's maximum velocity is set at 50cm/s, while the velocity decreases corresponding to its angular velocity. It is a pity that due to the scattering shoes along the corridor of building 3D, the success rate is low. Moreover, the destination could not be recognized so the robot will not stop wall following even after reaching the destination. So this demonstration only shows the wall following ability around the room and the corridor.
4th Place: Beego de Radiocon
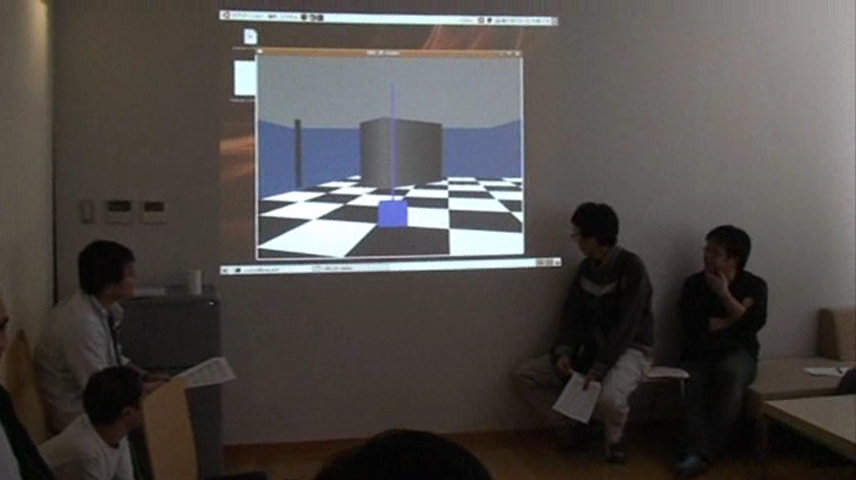
The 2D data from URG is shown in 3D artificially using OpenGL. User can click on any point in the area shown in the host PC, and the robot will move towards the corresponding location while avoiding obstacles. TCP/IP wireless network is used for the communication between host and client PC.
5th Place: Moving Obstacle Avoidance with Variable Speed

As the robot increase and decrease its velocity, moving obstacle and static obstacle can be avoided. The motion of the entire environment is estimated, and then the movable area of the robot for the next 3 seconds is calculated with an interval of 0.1 second. It is not a really good approach as it requires a large amount of computation.
6th Place: Come here

A Speego robot with a special Rapid-URG sensor which detects reflective board only is used in this demonstration. When the robot detects a reflector it moves towards that direction, but when there are even numbers of reflectors, the robot will move towards it and then back off. In fact, the robot will only move towards the nearest reflector when there are odd number of reflectors. So let's play by forming a team guiding Speego to goal, while another team trying to obstruct its way.
7th Place: Coke Distributing Beego

The URG Data are recognized in segments, and the segment similar to a Coke bottle is selected and the robot brings the Coke over. The robot compares the URG data segments with the shape data of a Coke bottle previously stored, and the closest matching segment is recognized as the Coke bottle. This demonstration is dedicated to the busy Roboken members who are Coke lovers.