2000年度 研究実験ムービー
移動系の自由度も用いて物体を操作する小型移動マニピュレータ~その1:物体把持運搬動作

なし
移動系の自由度も用いて物体を操作する小型移動マニピュレータ~その2:手先の軌道追従制御
なし
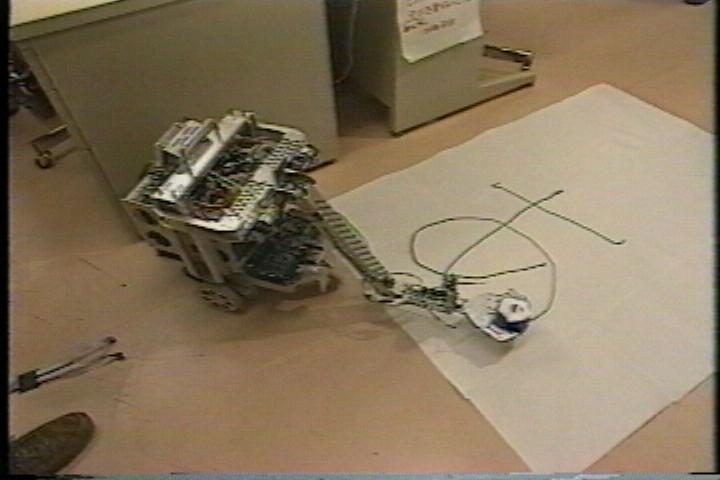
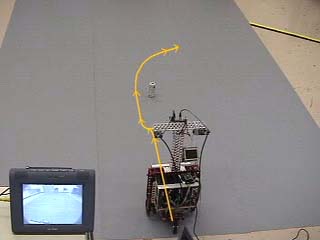
移動系の自由度も用いて物体を操作する小型移動マニピュレータ~その3:物体把持運搬動作
移動マニピュレータだいなのデモ。定められた位置に空き缶を置き、そこまでの走行経路を与える。走行中は超音波センサにより位置補正を行い、空き缶の正確な位置はカメラによって見つける。見つけた空き缶をマニピュレータで把持し、そのままスタート位置まで戻ってくる。
移動系の自由度も用いて物体を操作する小型移動マニピュレータ~その4:物体積み重ね動作

積み木動作を移動マニピュレータで行ったデモ。床に置かれた円柱型の積み木を特定の場所に移動させその上に別の積み木を乗せる。
自立移動ロボットの長時間活動に関する研究 ~基地への入庫実験~
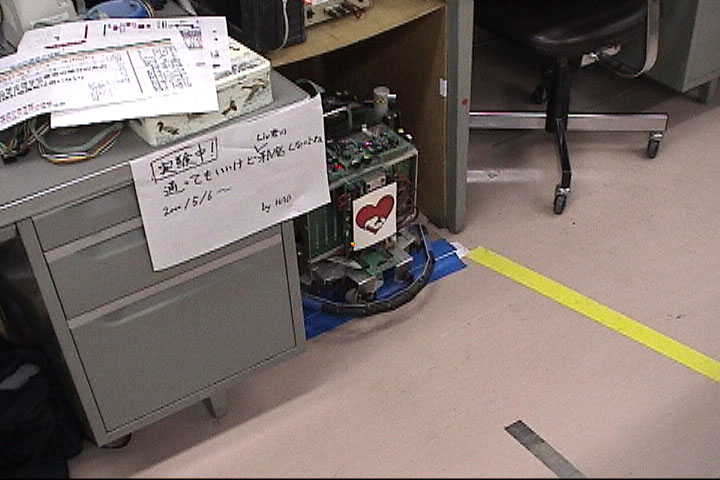
2000年5月8日から15日にかけて行なった、基地入出庫のみを10分おきに行ない続けるシンプルな長時間活動の実験の模様です。山彦Livは途中色々な邪魔をされますが、1週間,1080回,3391m の間 基地入出庫を自立的に行ない続けました。
ムービーではそのうちの4つの実験の模様を見ることが出来ます。
- 何事もなく基地から出て、また基地にはいる普通のケース。
- 別の角度からとった普通のケース。
- 床の入庫用テープに紙をかぶせてみた。間違って入庫が失敗することはない。
- 目の前に障害物をおいた。障害物がなくなるまでその場で音声をあげて待機。
前後二輪型自律移動ロボットの開発

知能ロボット研究室で唯一のバイク型移動ロボット。姿勢をジャイロセンサにより計測して、倒れないように操舵輪を制御して走行する。
段差を踏破する車輪型移動ロボット「六車士」
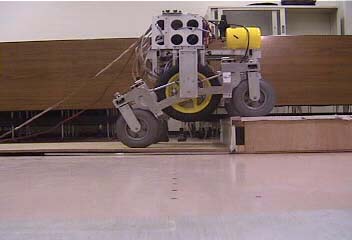
摩擦車(動輪)を真ん中に2つ、操舵輪を前後に4つもつ六車士。操舵輪を上下に振り上げる動作、平坦地の六輪走行と 16cmの段差を操舵輪を振り上げて乗り越える3つのデモが収録されている。
複数台自律移動ロボットによる分散未知環境探索

なし
ステレオビジョンセンサを用いた自律移動ロボットの障害物回避
ステレオカメラを持つ移動ロボットこあらのデモ。ステレオヴィジョンを使って障害物を検出しその回避経路を円弧と直線走行のみを用いて生成し、それに追従して走行する。また、カメラで撮られた画像も収録されている。
自律移動ロボットによる色画像を用いた歩道沿い走行

屋外ナビゲーションを行うために、カラー画像を用いて歩道を走行するシステムを開発。アスファルトの部分とそうでない部分の色情報の変化を用いて歩道の長手方向を検出し、その向きにロボットを走行させる。また、影や日照条件によってアスファルト部分の色情報に変化が見られてしまうが、影の部分も歩道と検出するようにしている。
レーザスリット投光器を導入したアクティブステレオビジョンによる障害物回避行動

レーザ投光器を左右に振ることで障害物を見つけている。走行経路は3本平行に与えられ、通常は真ん中の走行経路に沿って走行する。しかし、障害物が見つかると、残りの2本の経路のうち、一つに乗り換えて走行している。
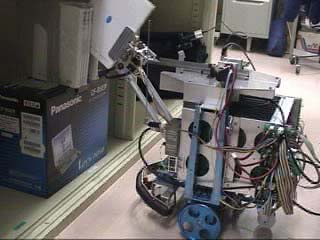
研究用プラットホームとしての移動マニピュレータの開発

7自由度を持つ移動マニピュレータだんぼのデモ。あらかじめS,Z,Nという3つの文字の点列を持っていてそれらを黒板の異なる場所に移動して1文字ずつ書く。
遠隔地より図書の閲覧を可能にするロボットの開発~その1:本の把持動作
ロボットが本棚から本を取りに行くデモ。オペレータがロボットのカメラの映像を見ながら本を1冊指定すると、自動的に形状を測定し、その本を取り出してオペレータの元へ持ってくる。
遠隔地より図書の閲覧を可能にするロボットの開発~その2:本の返却動作

ロボットが本を本棚に戻すデモ。オペレータがロボットのカメラの映像を見ながら本を返したい場所を指定すると、自動的に形状を測定し、持っている本を指示された場所に戻す。
超音波センサによる移動ロボットの障害物回避行動の研究

超音波センサが前方に8つ10度ごとにとりつけられており、虫の触覚の動きに似た障害物検知と回避行動を実現した。ゴール地点までの間にいくつかの障害物を配置し、超音波センサの情報を手がかりにそれらの障害物をなめらかに回避している。