2009年度 研究実験ムービー
筑波大学内ループ歩道3.5kmの自律走行実験

課題環境の自律走行を達成する為に、対象環境を歩道区間と交差点区間に分割し、それぞれに適した自律走行方法を考案し、それを切り替えながら自律走行することとした。歩道区間は測域センサを用いて歩道路面を認識し、それに沿ってセンサリフレクティブに自律走行を行う区間である。交差点区間は測域センサのデータとあらかじめ与えられた二次元地図との対応をとり、設定経路を自律走行する区間である。この自律走行方法で4km中市街地を省く3.5kmの自律走行に成功した。
複数の鏡と測域センサを用いた人数・形状計測システム
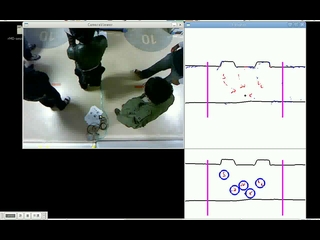
指定した範囲にいる人間の数を計測するシステムを構築した。センサには測域センサを用いるが、壁に貼った鏡面テープにより反射した光も利用することで、一台のセンサだけでも死角による計測誤差の発生しにくいシステムを実現している。ムービーの左側は、天井に設置したカメラから見た実験時の様子。右上が計測されたデータの様子で、+印はセンサの位置、赤が直接計測されるデータ、青が壁の鏡面テープで反射されて計測されるデータである。右下は、右上のデータにノイズ除去を施し、クラスタリングを行った結果であり、青い丸が抽出された人間である。
指定された経路上を走行するロボットが障害物回避を行うための経路計画法
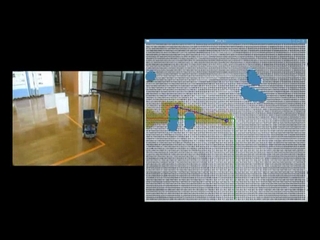
指定された経路上を走行するロボットが障害物回避を行うための経路計画法を提案した。二次元平面グリット上のDistance Transform法を基本としているが、指定経路上とそれ以外での重みを変えることで、なるべく指定経路上を走行するようなアルゴリズムを構築した。ムービーの左側が走行の様子で、地面上のオレンジ色の線が予め指定された走行経路である。ムービーの右側が回避経路生成の様子で、緑色の線があらかじめ指定された走行すべき経路、水色は測域センサによって検出された障害物、赤色が探索によって求められた回避経路、黄色は赤の経路を障害物でない部分に少し広げた領域、青色はロボットが取るべき進路を表している。ロボットは、なめらかに障害物を避けつつも、なるべく指定された経路に沿って走るという行動が実現されている。
屋外建物周囲の巡回走行

屋外建物周囲の巡回走行を実現した。走行経路は人間が予め指定する。ロボットの自己位置は、測域センサによって計測される環境の形状データを、準備走行時と本走行時で比較して修正を行う。障害物は、前述の方法で経路を生成して回避する。(処理の都合上、自己位置を修正する際にはロボットが一旦停止している。)ムービーでは、自転車などの障害物を避けながら、建物の周囲を三周している。
移動ロボットのためのエレベータの操作表示板認識
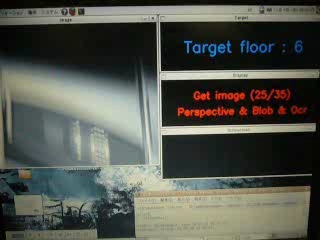
移動ロボットが初見のエレベータでも利用して階移動出来るように、ボタンなどの操作表示盤認識機能を実現した。エレベータに搭乗後、エレベータドアの周囲に沿ってパンチルトカメラで取得した画像を処理し、数字認識する。目的階のボタンが押されているかをボタン部分の輝度により認識し、点灯していたボタンの消灯を確認するとエレベータから降りる。